
Irányítás: vezérlés és szabályozás
A rendszereket irányítani kell
A rendszer kapcsolódik környezetéhez. Kimenőjelét szeretnénk a minőségi előírásoknak megfeleltetni (például a szobában szeretnénk a hőmérsékletet állandó értéken tartani a külső hőmérsékletingadozások ellenére). Ezt a rendszer környezetéből jövő bemenőjelének megfelelő változtatásával, a rendszer irányításával érhetjük el. Az irányítást a rendszer modelljének ismeretében az előírások figyelembe vételével tervezzük meg.
Egy villamos energiát szolgáltató erőműben biztosítani kell, hogy a feszültség és a frekvencia az előírt értékű legyen adott pontossági határon belül. Egy kőolajfinomító üzemben a desztillációs kolonnákban lepárolt egyes kőolajszármazékoknak előírt összetételűeknek kell lenniük. Egy hőkezelési folyamatnál a hőmérsékletet adott program szerint kell beállítani. Az előírt pontosságot befolyásolja, hogy a hőkezelendő anyagban ne játszódjanak le nem kívánt átalakulások. Egy autó vezetésekor biztosítani kell a sebesség tartását illetve előzéskor a gyorsíthatóságot. Ugyanakkor el kell kerülni a motor túlmelegedését. Gondolni kell az utasok kényelmének biztosítására is (például el kell kerülni a túlságosan nagy gyorsulások bekövetkezését). Egy repülő pályára állításának és pályakövetésének pontossága fontos a célállomás elérésének és más repülők elkerülésének biztosítására. Fontos a kívánt szabályozási beállási idő megadása is, aminek igazodnia kell a folyamat dinamikájához. Igen lassú folyamattól nem várhatunk túlságosan nagy felgyorsulást, mivel ehhez irreálisan nagy beavatkozó hatásokra lenne szükség. Az előírásoknak a lehetőségekhez kell igazodniuk. Az előírások a szabályozás statikus és dinamikus tulajdonságaira vonatkoznak. A rendszert el kell indítani, működését üzem közben megfelelően fenn kell tartani, és megfelelő leállításáról is gondoskodni kell.
Egy rendszernek megadott minőségi előírásokat kell teljesítenie. Ezt irányítással, a rendszer bemenőjeleinek megfelelő változtatásával valósíthatjuk meg. Ezek az előírások az irányítási céloktól, az adott folyamat technológiájától és magától a folyamattól is függnek. Vizsgálni kell az irányítási rendszer viselkedését, illetve úgy kell megterveznünk az irányítást, hogy az eleget tegyen a minőségi követelményeknek.
Az irányítással a rendszer elindítását, megfelelő üzemben tartását (kimenőjeleivel a megadott alapjelek követését, a zavarások elhárítását), megfelelő leállítását kívánjuk biztosítani.
Az indítást, leállítást általában logikai feltételek figyelembe vételével, nyílt hurokban vezéreljük. Az indítási, leállítási folyamat általában nem függ a folyamat kimenőjelétől.
A folyamat megfelelő üzemben tartását általában zárt hurkú szabályozással biztosítjuk, amely egy alapjel és a mért kimenőjel különbsége alapján avatkozik be a folyamat bemenőjelébe. A szabályozás tehát negatív visszacsatoláson alapul.
Egy folyamat irányításakor a vezérléseknek és a szabályozásnak összehangoltan kell működnie. A 116. oldalon egy példán keresztül kissé részletesebben tárgyaljuk a szabályozás és a vezérlés együttműködését.
A szabályozással szemben támasztott követelmények
A szabályozási körben az alapjel és a mért kimenőjel különbsége adja a szabályozó bemenőjelét, amelynek kimenőjele működteti a beavatkozó berendezést, amely a folyamat bemenőjelét adja. A szabályozót úgy kell megtervezni, hogy a folyamat teljesíteni tudja a szabályozással szemben támasztott minőségi követelményeket.
A szabályozót a folyamat modelljéhez és a minőségi előírásokhoz tervezzük.
A valóságos rendszerekben korlátozások lépnek fel, ha a bemenőjel meghalad egy adott értéket. A korlátozás bekövetkezése kedvezőtlen jelenségekkel járhat. A korlátozások fellépésekor bekövetkező jelenségeket kezelni kell.
A legtöbb folyamat nemlineáris. Általános, jól kidolgozott vizsgálati és tervezési (analízis és szintézis) módszerek lineáris rendszerekre állnak rendelkezésre. A nemlineáris rendszereket egyedileg kell vizsgálni. Hatékony eljárás az 54. oldalon tárgyalt szakaszonkénti linearizálás módszere.
Egy szabályozással szemben támasztott követelmények:
- Stabilitás
- Megfelelő statikus pontosság alapjelkövetésre és zavarelhárításra
- A mérési zaj hatásának elnyomása
- Előírt dinamikus (tranziens) viselkedés
- Érzéketlenség a paraméterváltozásokra
- A gyakorlati megvalósításból adódó korlátozások figyelembevétele
Egy szabályozási rendszertől megköveteljük, hogy stabilis legyen, hogy bemenőjeleinek megváltozásakor beálljon az új állandósult állapot, ne lépjenek fel állandósult vagy egyre növekvő lengések. Ugyancsak kitérítve állandósult, egyensúlyi állapotából adott idő után, a tranziensek lecsengésével térjen vissza egyensúlyi állapotába. A stabilitás problémája a zárthurkú visszacsatolt irányítás, a szabályozás esetében merül fel. Oka, hogy a szabályozási kört dinamikus tulajdonságokkal rendelkező tagokból, fizikai elemekből építjük fel, amelyek bemenőjelük változására csak késleltetve képesek válaszolni. A késleltetés ideje alatt változnak a rendszer jelei, és ha a késleltetés túl nagy, ha az egyes elemek erősítési tényezői nagyok, a rendszer jelei „megszaladhatnak” mialatt a rendszer nem képes megfelelően válaszolni. A jelenséget a „Negatív visszacsatolás” fejezetben (90. oldal) szemléltetjük.
A szabályozás statikus pontosságát tipikus bemenőjelekre (ugrás, sebesség- és gyorsulásugrás) a nyitott körben lévő integrátorok száma határozza meg. Az integrátor olyan elem, amelynek kimenete akkor állandósul, ha a bemenete végülis zérus értékre áll be. Egy integrátort tartalmazó szabályozási kör tehát az ugrásalakú alapjelet állandósult hiba nélkül tudja követni. A statikus pontosság részletesebb tárgyalását a „Statikus pontosság” fejezetben (94. oldal) adjuk meg.
Az előírt dinamikus (tranziens) viselkedést rendszerint a szabályozási kör $v(t)$ átmeneti függvényének (egységugrás alapjelre adott válaszának) jellemző paramétereivel adjuk meg (1. ábra).
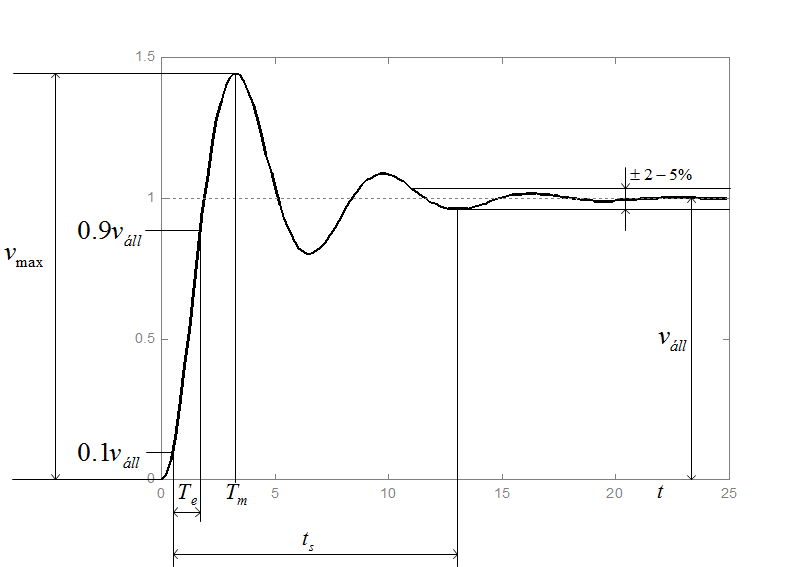
1. ábra A szabályozási kör átmeneti függvényének jellemzői
A statikus hiba vagy maradó szabályozási eltérés $1-v_{all}$
A százalékos túllendülés vagy túllövés: $\sigma=\frac{v_{max} - v_{all}}{v_{all}}100%$
A $t_{s} $ szabályozási idő az az idő, amely alatt az átmeneti függvény eléri az állandósult értéke körüli $\pm \left(2-5\right)\% $-on belüli sávot.
A $T_{e} $ emelkedési idő alatt az átmeneti függvény állandósult értékének 10%-os értékéről eléri állandósult értékének 90%-át.
A túllendülés, szabályozási idő előírható értéke függ magától a folyamattól is. Vannak olyan technológiai folyamatok, ahol nem engedhető meg túllendülés, aperiodikus lefolyású tranzienseket kell biztosítani. Egy lassú folyamat esetén a túlságosan rövid szabályozási idő előírása túlságosan nagy beavatkozójel értékek fellépését eredményezné, amit a beavatkozószerv nem tud szolgáltatni, „betelít” egy korlát értéknél, ami a szabályozás viselkedését kedvezőtlenül befolyásolja. Ha korlátozás lép fel a rendszerben, annak hatását kezelni kell, sokszor a szabályozási struktúra megfelelő módosításával.
Korlátokat írhatunk elő egyes változók értékeire, a változók változási sebességére (pl.mechanikai mozgás esetén az elmozdulás illetve a sebesség maximális értékére).
A szabályozás jóságát sokszor az $e\left(t\right)=1-v\left(t\right)$ hibajel integrálkritériumainak mérőszámai alapján ítéljük meg (lásd 44. oldal). Ha a szabályozónak van egy változtatható paramétere, az megválasztható úgy, hogy a tekintett hibaintegrál minimumot érjen el. A hibaintegrál, egy költségfüggvény optimalizálásával optimalizálási feladatot kell megoldani a korlátozások figyelembe vételével.
A paraméterek változásának hatását az érzékenységi függvények segítségével vizsgálhatjuk. A robusztus szabályozótervezés figyelembe veszi a paraméterek változását egy megadott tartományban, és úgy tervezi meg a szabályozót, hogy a szabályozás az adott bizonytalanság mellett is teljesítse az elvárásokat. Az ilyen követelményeket kielégítő szabályozást robusztus szabályozásnak nevezzük.
Hivatkozások:
Aström and Murray (2008)