Vezérlés és szabályozás együttműködése
Dr. Nagy Dezső
Az irányítási rendszerekben a nyitott hurokban üzemelő vezérléseknek és a zárt hurokban üzemelő szabályozásoknak együtt kell működniük. A vezérlések általában logikai feltételek teljesítését biztosítják például a rendszer megfelelő feltételeknek eleget tevő elindításához, leállításához, a korlátok betartásának ellenőrzéséhez, vészhelyzetek kiküszöböléséhez. A szabályozás biztosítja a rendszer üzemszerű működését, az alapjel követését, a zavarások hatásának elhárítását.
Korábbi időszakokban - a relés technika és a csöves erősítők korában (1960-as évek) - tipikusak voltak az egyszerű, relés vezérlések, amelyekben parancskiadás, végrehajtás után nem volt az irányítási struktúrában visszacsatolás.
Hasonlóképpen gyakoriak voltak az egyhurkos mennyiség, nyomás, szint, stb. szabályozások kompakt szabályozókészülékekkel, amelyekben megvalósult a szabályozott jellemző – pl. nyomás- visszacsatolása a bemenetre, és az alapjellel való összehasonlítás után a hibajel minimalizálása érdekében módosult a beavatkozó jel.
A technológiai folyamatok teljesítményének és bonyolultságának növekedése (pl. 50MW-ról 1000MW-ra nőtt az erőművi blokkok egységteljesítménye kb. 40 év alatt), az üzemeltetési manőverek szükségessége (terhelés változtatás, üzemelő technológiai vonalak konfigurálása, üzemanyag változtatás, stb.), a gazdaságos üzemvitel biztosítása erős igényt teremtett az irányítástechnikai rendszerek komplexitásának növelésére.
Ennek megfelelően a magasan automatizált korszerű technológiáknál ma már tipikus, szinte alapvető igény a szabályozások és a vezérlések összehangolt együttműködése.
Tipikus példaként említhető az üzemzavar kisegítő gyorsindítású gázturbinák indítása, ahol a helyi üzemeltető vagy manapság a fölérendelt hálózatvezérlő központ
- megadja a célteljesítmény MW-ot (pl. 170 MW),
- kiválasztja az üzemanyagot (gáz vagy olaj),
- megadja a start parancsot.
Igy a gázturbina - az I&C (Instrumentation and Control) programjában lévő indítás lefutó vezérlés működésének megfelelően - 7-8 perc alatt (20-30 vezérlési lépést végrehajtva, 8-10 szabályozási kört megfelelő alapjellel ellátva) eléri a 170MW célterhelést, kompenzálva a hálózat termelés - fogyasztás egyensúlyi üzemzavarát. (Az I&C program az adott gázturbinára tartalmazza az összes mérés, vezérlés és szabályozás alkalmazói programját.)
Az ilyen típusú feladatok megoldásához szükséges az irányítástechnikai tervező rendszerben az együttműködéshez szükséges szabályozási és vezérlési blokkok készletének megléte. Ezekből itt most a PID szabályozó és a lefutó vezérlés blokkjait emeljük ki, példán szemléltetve használatukat.
Vezérléshez illeszthető PID szabályozó blokk, a szükséges üzemmódokkal
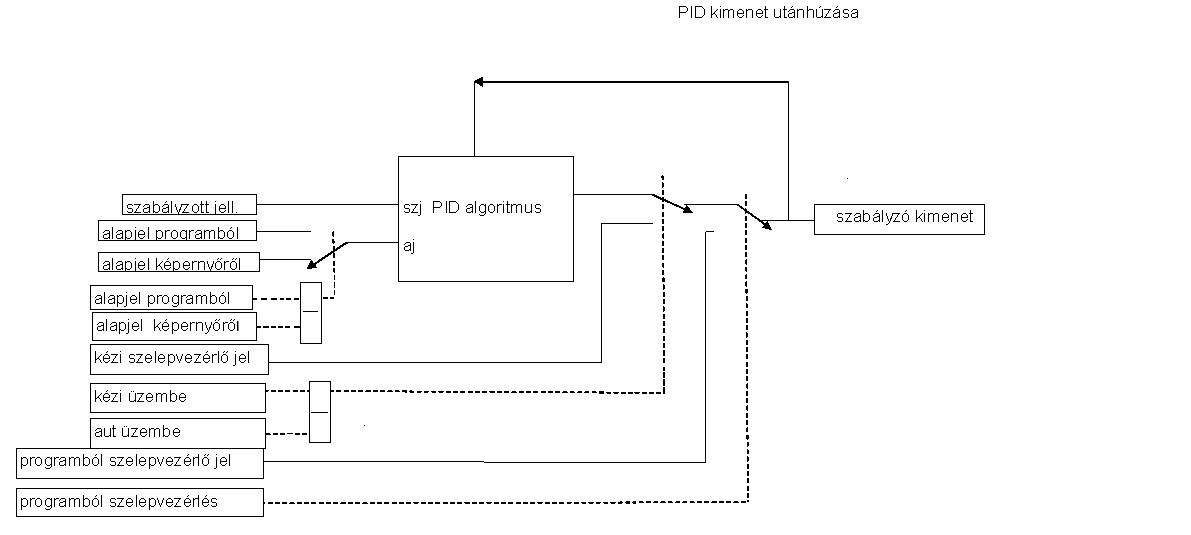
1. ábra PID szabályozó áttekintő elvi sémája
(jelölés: szj: szabályozott jellemző, aj: alapjel)
Egy korszerű PID szabályozó áttekintő elvi sémája az 1. ábrán látható. A szabályozó kimenet állítása szempontjából a szabályozónak az alábbi üzemmódjai vannak (itt beavatkozó szervként szabályozó szelepet tételezünk fel):
- Kézi (man) üzemmód.
- A kézi szelep vezérlőjel állítása a képernyőről, a szabályozó kezelő ablakból lehetséges.
- Automatikus (aut) üzemmód. A szelepállítást a PID algoritmus végzi.
- Kézi/aut üzemmód impulzus paranccsal állítható. Az aktuális állapot a funkción belül tárolt.
-Szelepvezérlő (trace) üzemmód. Itt a szelepvezérlő bin jel statikus, ami azt jelenti, hogy ameddig a trace jel=1, addig van trace üzemben a szabályozó.
Ebben az üzemmódban a szelep pozíció állítójele az I&C programból érkezik.
Ezen alapvető üzemmódok prioritási (erős > gyenge) sorrendje: szelepvezérlő, kézi, automatika.
Az alapjel forrás szempontjából a következő üzemmódok vannak:
- Belső alapjeles üzemmód. Az alapjel állítás a képernyőről, a szabályozó kezelő ablakából lehetséges.
- Külső alapjeles üzemmód. Az alapjel állítás az I&C programból történik.
A belső/külső alapjel üzemmód impulzus paranccsal állítható. Az aktuális állapot a funkción belül tárolt.
A fenti funkciókhoz szükségesek az alábbi be- és kimenőjelek:
Bemenetek programból:
- kézibe/autba üzemmódba, bin impulzus,
- szelepvezérlő jel I&C programból, bin statikus,
- külső/belső alapjelbe, bin impulzus,
- szabályozott jellemző (process variable) analóg,
- kézi szelepvezérlő jel, képernyőről, analóg,
- szelepvezérlő jel, programból, analóg,
- alapjel képernyőről, analóg,
- alapjel programból, analóg.
Kimenetek a program számára:
- végrehajtó szerv (szelep) beállító jel, analóg,
- szabályozási eltérés analóg,
- K/A üzemállapot, hibajel bin.
A kézi vagy szelepvezérlés üzemmódokból > az automatikus üzemmódba való lökésmentes átkapcsoláshoz szükséges, hogy a kézi üzemű - vagy programból jövő - szelepparancs jelet az automatika üzem parancstárolója kövesse. Ezt valósítja meg a PID kimenet utánhúzása.
Maga a PID szabályozó alapvető, egyszerűsített diszkrét idejű algoritmusa az alábbi:
$Y[n]=AP*(XE[n]-1/TI*\sum\limits_{i=1}^n(XE[i])*DT+TD*(XE[n]-XE[n-1])/DT)$
Rekurzív algoritmus is megadható:
$Y[n]=Y[n-1]+$$AP*(XE[n]-XE[n-1]+XE[n]*DT/TI+TD*(XE[n]-2*XE[n-1]+XE[n-2])/DT)$
ahol $Y[n]$ az n-edik ciklusban a szabályozó kimenete, $XE[n]$ az n-edik ciklusban a szabályozási eltérés, $DT$ a futási ciklusidő (mintavételezési idő), $AP$ az erősítési tényező, $TI$ az integrálási, $TD$ a differenciálási idő.
Lefutó vezérlés (Sequential Function Control, SFC) blokkok
A lefutó vezérlést és annak blokkjait az IEC61131 szabvány specifikálja. A lefutó vezérlés az üzemeltetés vezető idősorrendben egymásután következő, lépésszerű tevékenységeit valósítja meg az I&C alkalmazásával a technológiai folyamat kezelése céljából. (A szabványra azért van szükség, hogy a különböző cégek (Siemens, ABB, Emerson, stb.) által szállított blokk készlet elemei hasonló módon lássák el a funkcióikat. Ez későbbi használatuknak, szervizelésüknek fontos feltétele.)
Itt egy egyszerű egyágas lefutó vezérlésen szemléltetjük a működést, a legegyszerűbb feltételek mellett.
A lefutó vezérlés három fajta blokkot tartalmaz.
A lefutó vezérlésben az init blokk (fejblokk) az első, ez aktív az indítás előtt automatika üzemben. Ezt transition logikák és step blokkok követik.
A step (lépés) blokkok (step1, step2,…) adják ki az egyes lépésekhez tartozó parancsokat.
A transition logikák az aktuális lépésben kiadott parancsok teljesülését, azaz a továbblépési feltételt vizsgálják és a feltétel teljesülése esetén az aktuális lépést passzívvá, a következő lépést aktívvá teszik.
Az utolsó blokknak Transition logikának kell lennie, mert innen ugrik vissza a program az Init blokkra feladatának elvégzése után. A blokkok futási sorrendjét a lefutó vezérlés blokksémája rögzíti (2. ábra).
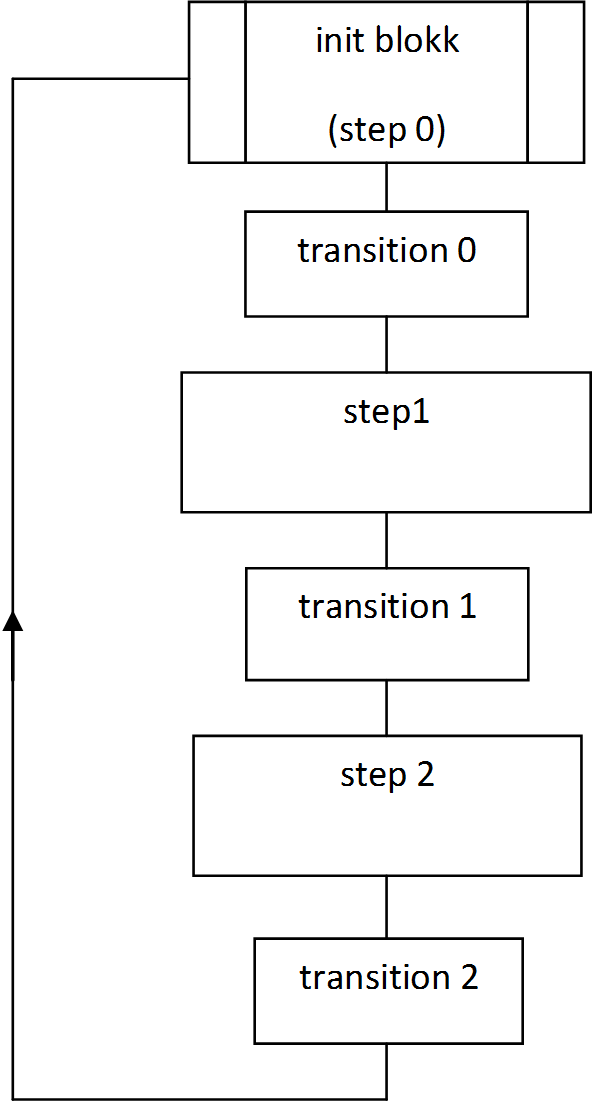
2. ábra Lefutó vezérlés logika
Az indító blokk (initblokk) kezeli a lefutó vezérlés kézi és automatika üzemállapotait, kezi ill. aut parancsra a megfelelő üzemállapotba megy, reset parancsra a teljes vezérlés alapállapotba kerül.
A transition blokkokba kell beírni a továbblépés logikáját. Ha a továbblépési feltétel teljesül, akkor a tov felt =1 lesz, ezért a step 1 lépés aktív lesz, az előző lépés (ez esetben a step0 ) pedig passzív.
![]()
A step blokkok
Egy step blokk az aktivizáló jelet a tov bemenetére kapja az előtte lévő transition blokkból. Ha a step1 blokk aktívvá lesz, akkor az aktiv kimeneten kiadja a hozzá rendelt parancsot (parancsokat) és majd akkor lesz passzív, ha az utána következő Transition (megkapva a parancsvégrehajtás visszaigazolást) tov felt értékre „1” lesz.
A step blokkhoz megadható egy várakozási idő. Ezen idő letelte után történik a továbblépés vizsgálata, ha a technológia így igényli. A szokásos másik időparaméter a végrehajtási idő hiba, ha egy megadott adott időn belül nem teljesül a továbblépési feltétel. Ehhez hibajel rendelhető.
Ha egy technológia két folyamatát (indítás, leállás) akarjuk automatizálni, akkor az initblokk után két transition blokk van, egyik az indítási parancsot kezeli, a másik a leállási parancsot.
A lefutó vezérlés és egy PID szabályozó együttműködését az alábbi tipikus, egyszerű részfeladaton szemléltetjük.
A feladat megfogalmazása:
Adott egy vízáramlás kezelés részfolyamat. A technológiai részfolyamatnak van egy indulási és egy leállási ága.
- indulás előtt a szabályozó szelep előtt megvan a víznyomás (előtte már egy szivattyú üzemel)
- indulás után fix szelepállás (pl. 30%) mellett indul a technológia,
- 1 perc várakozás az áramlás kialakulására,
- ezután az 1. alapjellel üzemel a szabályozó 10 percig,
- 10 perc leteltével a 2. alapjel szükséges és ez az alapjel marad, amíg a technológia leállási parancsot nem kap a lefutó vezérlésre.
- a leállási folyamat lekapcsolja a szabályozó automatikus üzemét és lezárja a szelepet.
Az irányítástechnikai program jelekkel dolgozik, amelyek egy funkcióazonosító kódból és egy jelkódból állnak. Itt példaként a KKS (Kraftwerk Kennzeichnen System ) azonosítókat használjuk.
A lefutó vezérlés funkció azonosítója 00GHC10EC001, és a „lépés aktív” jelkódok rendre XS01, XS02,… az indításhoz és XS51,XS52,…a jelkódok a leálláshoz.
Igy példaként a step2 aktív állapotot azonosító jel 00GHC1010EC001_XS02.
A szabályozott jellemző itt egy vízáram, 00GHC10CF001_XQ01
A szabályozó funkcióazonosító kódja 00GHC10DF001, az _XQ10 jelkód a 1. alapjelének értékét, az _XQ11 a 2. alapjelének értékét jelenti.
A 3. ábra a fenti feladatnak megfelelő lefutó vezérlés áttekintő logikai sémáját mutatja.
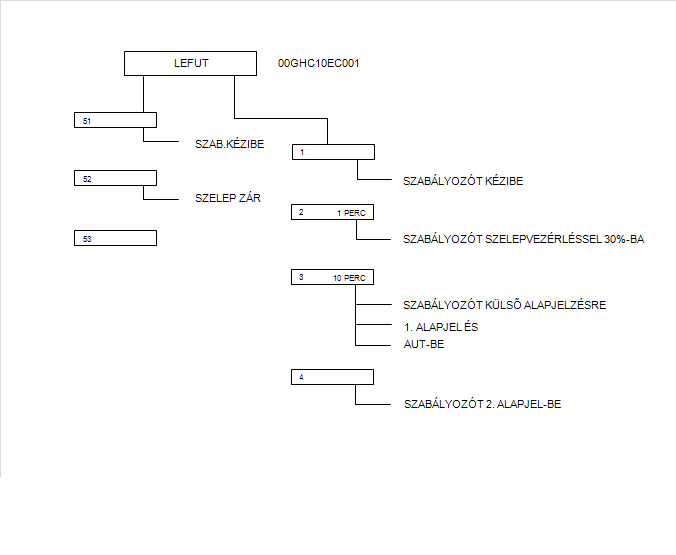
3. ábra A feladatnak megfelelő lefutó vezérlés áttekintő logikai sémája
A szabályozó pedig a fenti logika szerint működik:
A PID szabályzó bemenetei:
- A automatikába, (impulzus jel),
- K kézibe (impulzus jel),
- V programból szelepvezérlés üzemmódba (statikus jel),
- SZ szelepvezérlő analóg jel programból,
- SET az aktuális alapjel analóg értéke
- EXT külső alapjeles üzemmód választása, impulzusjellel
- INT alapjel képernyőről választás nincs használva
- PV a szabályozott jellemző, itt 00GHC10CF001
A lefutó vezérlés áttekintő logikai sémájának és a szabályozó logikai tervének összevetéséből látható a működés.
A 00GHC10EC001 lefutó vezérlés XS01 jele a szabályozót kézi üzembe kapcsolja, majd a 2. lépésben az XS02 jel a szabályozót szelepvezérlő üzembe kapcsolja a (30%) szelepvezérlő jellel.
Egy perc eltelte után a 00GHC10EC001_XS03 azaz 3. lépés aktiv jellel a szabályozót automatika üzemmódba teszi, külső alapjeles üzemmel, 00GHC10DF001_XQ10 alapjellel 10 perc hosszan.
10 perc lejárta után a 00GHC10EC001_XS04 (4. lépés aktív) a külső alapjelet 00GHC10DF001_XQ11 értékre változtatja, amelynek értéke ezután a technológiának megfelelően az alkalmazói programból íródik.
A leállási program hasonlóan követhető.
A 4. ábra mutatja a szabályozót a logikával.
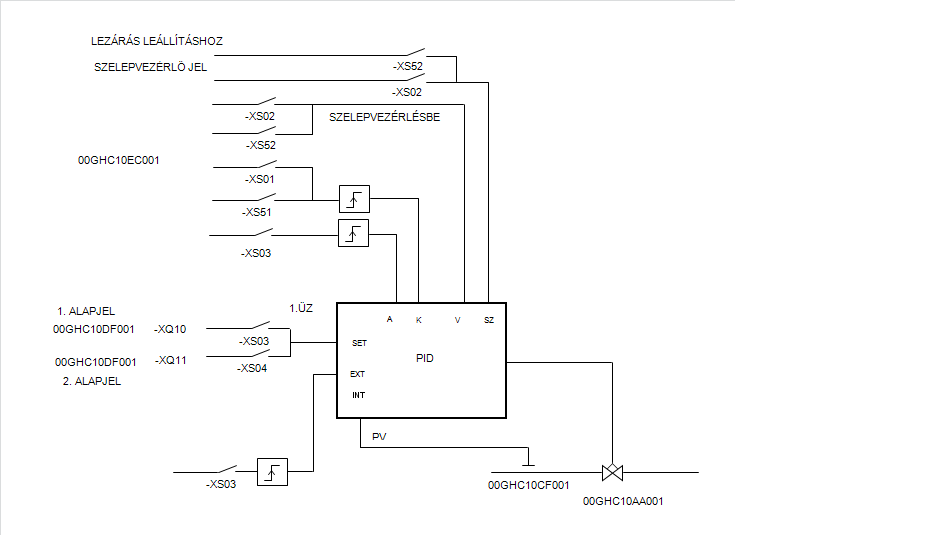
4. ábra A szabályozó a logikával