State space modelling of continuous processes
We can describe the time behaviour of continuous processes with input-output models or state models.
Input-output models describe the relationship between the y output signal and the u input signal, usually expressed in an nth order differential equation. The differential equation describes the relationship between the output signal and its small changes (differentials) and the input signal and its small changes.
There are internal variables in the system too: the state variables. As a characteristic feature, the momentary value of state variables is determined by past changes, so they cannot react immediately to sudden changes of the input signal but they reach their new value gradually. Generally, the output signal of the system is shaped through the state variables.
In technical systems, state variables are often connected to basic physical processes where we have to consider relationships necessary to calculate the storage of mass, electricity, impulse or energy. Typical examples for state variables are, for example, charge in an electric system, displacement and velocity in a mechanical system and temperature in a thermal system.
Figure 1 shows the input signal, output signal and state variables in a system.
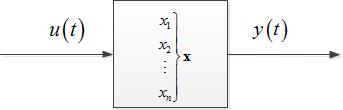
Figure 1: The signals of a system: input signal, output signal and internal state variables
With state variables the behaviour of the system is described by a system of first order differential equations. This means that instead of the nth order differential equation, the system is expressed by n number of first order differential equations.
The advantage of using state variables for describing the system is that it defines the output signal and besides provides information about the change of internal state variables over time. The solution of the system of first-order differential equations is simpler that the solution of the nth order differential equation.